


 792
792
在科技飞速发展的当下,人工智能与边缘计算的融合正以前所未有的速度重塑着我们的生活。RK3576芯片拥有4核Cortex-A72以及4核Cortex-A53提供基础算力,6TOPS算力NPU来模型推导运算。使用YOLOv8模型时也是手到擒来,接下来随着步伐看看它表现如何。
YOLO简介
YOLO(You Only Look Once)是当前业界领先的实时目标检测算法系列,以其速度和精度的完美平衡而闻名。从它发布至今,经历了好几个版本变革,下图是它发展历史。
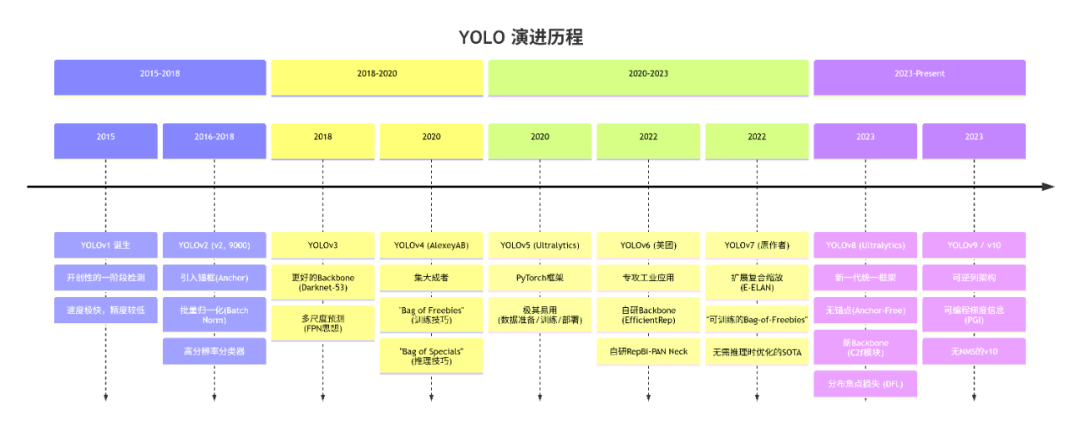
图1-1. YOLO版本发展史
YOLOv8在性能、易用性、架构现代性和生态之间取得了最佳的平衡,它是目前最全面,最省心选择。
同样YOLOv8也有很多尾缀,用一个表简单列一下它们分别代表什么意思:
表1-1.按任务类型区分
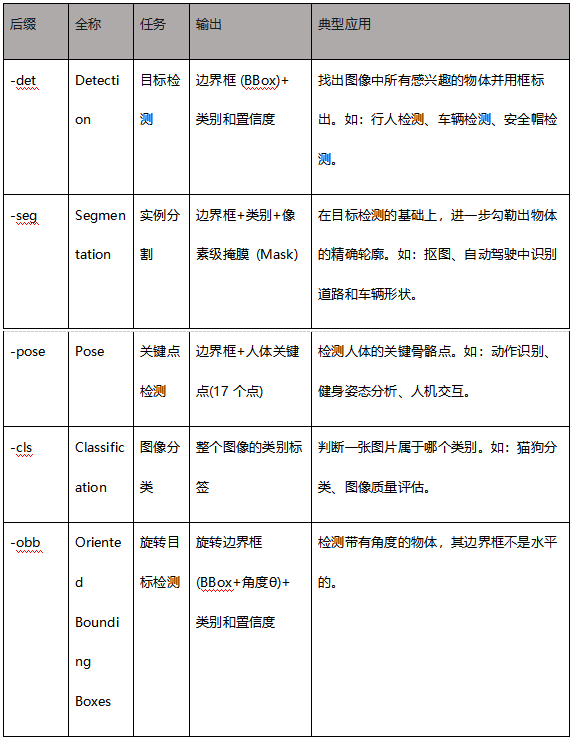
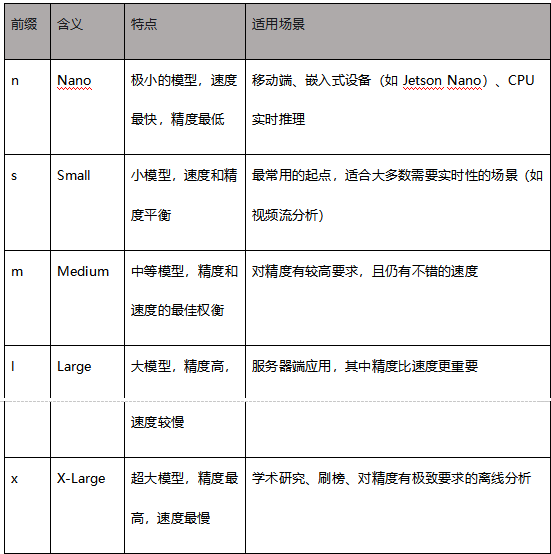
表1-2.按模型尺寸分
米尔Demo模型选择
基于MYD-LR3576来说,选择s/n小模型相对合适,使用基础功能和-seg,-obb,-pos来演示。
单独测试视频场景效果展示
1.YOLOv8s.int 目标检测模型

2.YOLOv8s-seg.int 实例分割模型

3.YOLOv8s-pose.int 人体姿态估计模型

4.YOLOv8s-obb.float 旋转目标检测模型

上面已经看到了单独解析视频时,每一种模型效果,接下来演示MYD-LR3576通过4路摄像头同时推导效果。

实现方式如下:
MYD-LR3576拥有3路MIPI-CSI接口,通过3个MY-CAM004M分别接入3路MIPI-CSI,采用2+1+1方式搭载4路AHD高清摄像头,摄像头采集的画面输出为H.264编码的RTSP码流,1920*1080分辨率,30帧。经过MYD-LR3576开发板处理后,单路视频输出1920*1080,25fps,4路视频加起来在60~70帧,cpu占用率接近100%,NPU综合利用率在50~60%。
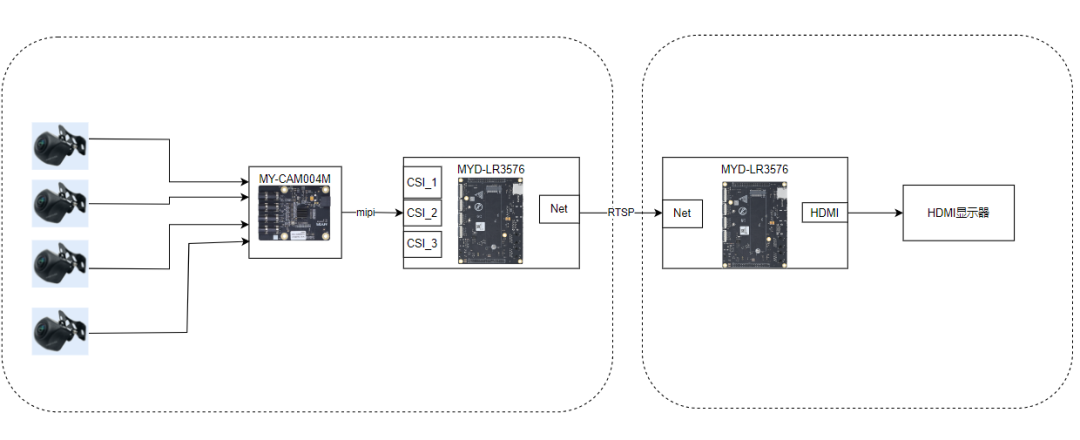
图1-2.?实物接线概要图
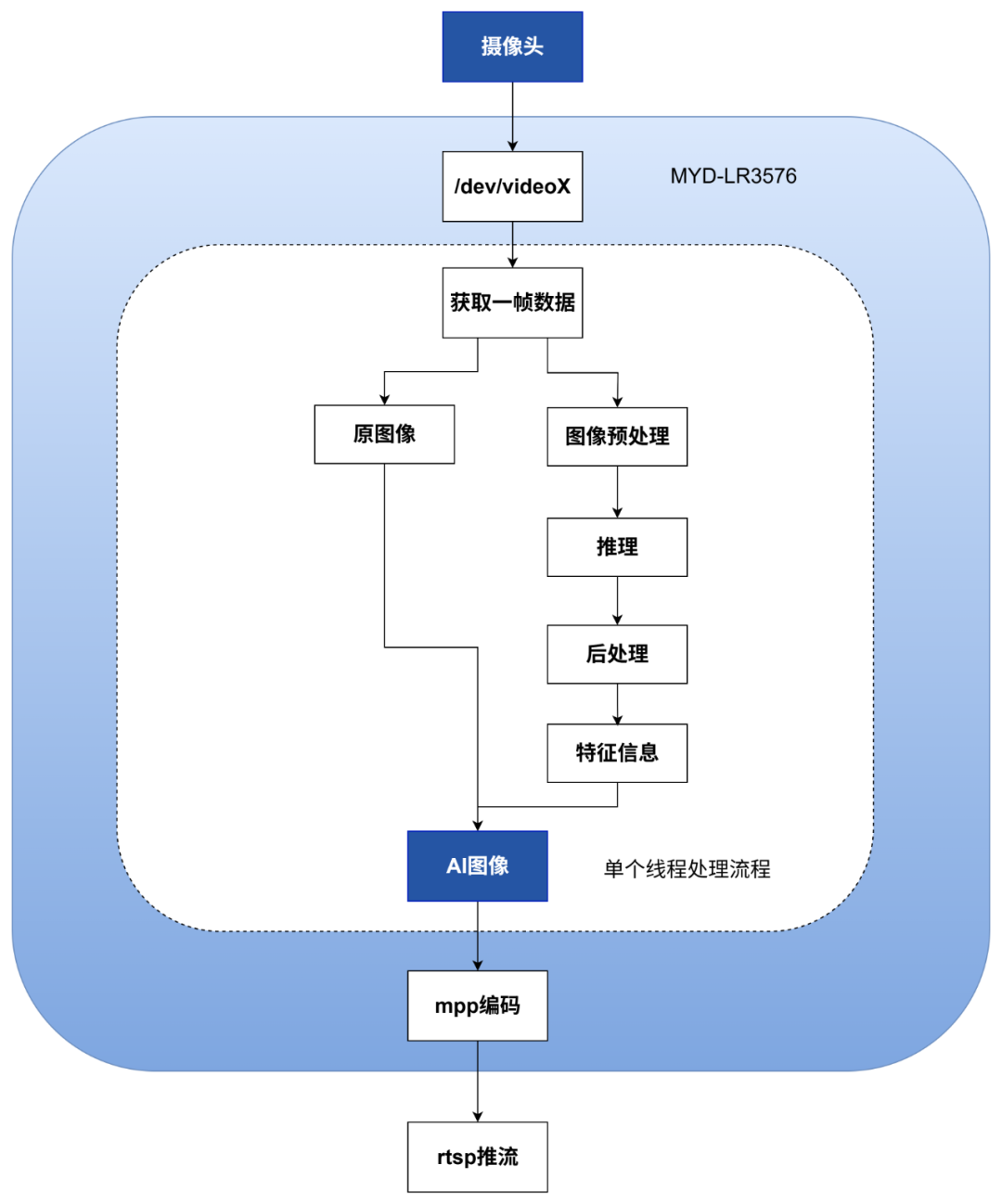
图1-3.?摄像头数据处理流程图
MYIR在程序中做了哪些优化
AI推导一轮流程
- 获取CSI一帧数据
- 裁剪数据到xxx*yyy较小图片
- 调用RKNN api处理
- 获取返回特征位置和相似度
- 对应放大到原始图片
- 增加方框和相似度值到原图
这样做后果是CPU利用率不高,视频采集帧数低,最后显示效果会卡顿。
米尔采用线程池方案,将上述过程通过线程处理,充分利用4个A72和4个A53资源,同时采用RGA来做图片裁剪和放大。将CPU,GPU,NPU,VPU4个模块协同工作,资源最大限度开发使用。
总结:
RK3576 在 YOLOv8 模型表现上十分亮眼,它的应用场景涉及到很多领域。例如智能安防,在公共场所,如机场、火车站、商场等,部署的安防监控系统,快速准确地识别出人群中的异常行为,如打架斗殴、奔跑逃窜等,并及时发出警报,同时,通过人脸识别技术,系统可以对进入场所的人员进行身份识别,与数据库中的信息进行比对,实现对重点人员的监控和追踪。又或者搭载智能机器人赋予迅速反馈。







