


 4031
4031
Euro NCAP 2026 是欧洲汽车安全性能测试领域的全新标准,将于 2026 年实施,相比之前的标准,在难度和覆盖面上都有完善,堪称欧洲最严苛的安全测试。以下是具体介绍:
- 评级方法:新的评级系统更加全面和细致,主要分为安全驾驶、碰撞避免、碰撞保护、安全救援四个方面,每个方面总分均为 100 分。
- 测试内容:
安全驾驶:主要包括乘员监控(30 分)、驾驶员监控(30 分)、车辆辅助(40 分)。可采用实车测试和仿真测试相结合的方式,评估车道保持辅助系统、自适应巡航控制系统等功能的性能。还增加了儿童防遗忘车内功能检测。
碰撞避免:通过实车测试和道路试验,检测车辆的前向碰撞警示系统、自动紧急制动系统等功能的实际效果。总分 100 分,其中前向碰撞 60 分,车道偏离 20 分,加速预防 20 分。增加了一些低速场景和前后向油门防误踩 PMA 场景。
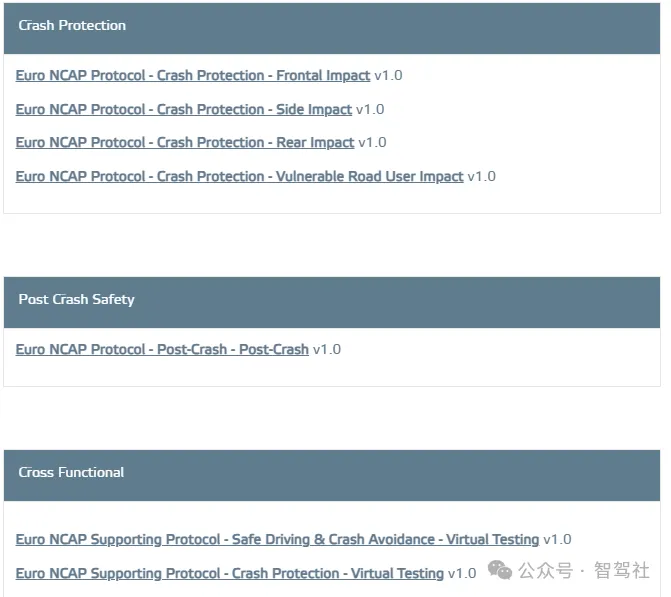
碰撞保护:采用实车测试和人体模拟测试,评估车辆在前向碰撞、侧面碰撞、行人碰撞等情境下的保护效果。其中前向碰撞 40 分,侧向碰撞 35 分,后向碰撞 5 分,人员保护 20 分。
安全救援:总分 100 分,其中救援信息 40 分,后碰撞安全 25 分,乘员解救 35 分。
- 新规特点:自 2026 年 1 月起,没有特定传统控制按键的车辆将会被扣减分数。这些特定的传统控制包括转向灯、双闪警示灯、喇叭、雨刷和 eCall 紧急呼叫。此举旨在鼓励制造商以直观的方式使用单独的物理控制基本功能,限制驾驶员目光离开道路的时间,保证驾驶安全。
- 相关测试:2025 年 3 月 21 日,阿维塔 06 于中汽研汽车检验中心进行了全球首次 E - NCAP 2026 碰撞测试,并高分通过 50% 重叠率对碰试验测试。测试中车辆相对速度达到 100km/h,阿维塔 06 在碰撞后 A 柱无损伤,前风挡完好,四门正常打开,E - Call 第一时间接入,假人易伤部位未受到损伤,展现出良好的安全性能。
有需要进行Euro-NCAP2026测试或咨询的欢迎联系小编。

Euro NCAP 2026 年安全标准体系以 "驾驶员 - 车辆 - 乘客" 三维安全框架为核心,首次将驾驶员状态监控、乘客存在检测与智能辅助系统评估深度整合。三大协议《安全驾驶驾驶员参与》《安全驾驶乘客监控》《安全驾驶车辆辅助》于 2025 年 3 月发布,2026 年 1 月正式实施,标志着汽车安全评估从被动防护向主动预防的全面转型。以下从技术要求、评分体系、行业影响三方面展开深度解读。
《安全驾驶驾驶员参与协议》:重塑人机交互安全基线
1. 驾驶员状态监控(DSM):从 "双手检测" 到 "认知状态" 的跨越
1.1 瞬态分心检测:毫米级视觉注意力追踪
- 检测维度:
长分心(3-4 秒视线偏离):
覆盖 Owl 型(头部转动)、Lizard 型(眼球转动)、身体倾斜三类动作,需检测驾驶员侧窗、手套箱、后视镜等 12 个视线落点
短分心(30 秒内累计 10 秒分心):
支持多目标区域切换检测,如仪表盘 - 中控屏 - 乘客区的循环注视
手机使用:
区分基础使用(膝盖 /lap 位置)和高级使用(方向盘上方 / 仪表盘挂载),需检测 6 种握持姿势 - 评分标准:

1.2 非瞬态状态干预:从 "疲劳提醒" 到 "紧急避险" 的进化
- 微睡眠 / 睡眠检测:
通过眼睑开度(<6mm)+ 头部姿态(前倾> 15°)双传感器融合,要求 1.5 秒内触发渐进式警告(视觉闪烁→声光组合→安全带预紧) - 无反应驾驶员处理:
间接检测(转向无操作超 30 秒):启动 Emergency Function,10 秒内完成车道保持 + 减速至 < 10km/h
直接检测(DSM 识别闭眼超 6 秒):优先变道至应急车道,同步触发 eCall
2. 驾驶控制设计:物理按键的 "安全底线" 原则
2.1 关键功能强制物理控制
- 必须保留的直接物理输入:
转向指示灯、危险报警灯、喇叭、雨刮器、eCall 紧急呼叫
设计要求:触觉反馈(机械行程≥2mm)、盲操定位(距方向盘 30mm 内)、防误触(需 2 级按压) - 评分惩罚机制:
无独立物理按键的功能每项扣 0.5 分,总分扣完为止
2.2 人机交互界面(HMI)评估
- 信息显示规范:
车速、限速、ADAS 状态等关键信息必须在驾驶员直接视线内(仪表盘或 HUD)
辅助系统状态切换需同步视觉(绿色→黄色)+ 听觉(双音提示)反馈 - 触控交互限制:
空调、多媒体等非安全功能允许 2 级菜单触控,但单次操作耗时不得 > 2 秒
方向盘触控区域需有物理纹理区分,误触率需 < 5%
《安全驾驶乘客监控协议》:从被动约束到主动守护
1. 安全带智能管理系统:全场景误用检测
1.1 安全带路由异常识别
- 检测场景:
仅扣插扣未佩戴(分值 2)
安全带绕背后佩戴(分值 1)
仅使用腰带(分值 2) - 警告策略:
视觉:仪表盘红色图标闪烁(频率 2Hz)
听觉:连续蜂鸣(前 30 秒间歇,之后持续)
触觉:安全带预紧脉冲(每 10 秒一次)
1.2 后排乘客监控
- occupancy detection:
检测技术:压力传感器 + 毫米波雷达融合
评分公式:(后排有检测功能的座位数 / 总后排座位数)×5 分
特殊要求:ISOFIX 接口位置必须 100% 检测
2. 乘客分类与保护系统:动态适配安全策略
2.1 前排乘客空气囊智能控制
- 自动模式(4 分):
后向儿童安全座椅→空气囊关闭
5th percentile 成人→空气囊正常启用
响应时间: occupant 变化后≤10 秒 - 手动模式(1 分):
需硬件开关(标有 "PASSENGER AIRBAG OFF/ON"),禁止软件一键关闭
2.2 异常坐姿检测(OoP)
- 近距离检测(1 分):
头部距仪表板 < 20cm 时,视觉警告 + 座椅震动 - 脚部置仪表台(1 分):
三区域(内侧 / 中央 / 外侧)全检测,声光联动警告
3. 儿童存在检测(CPD):防遗忘安全闭环
3.1 检测场景与评分

3.2 技术实现要求
- 直接传感:
心跳 / 呼吸检测(误报率 < 0.1%) - 干预链路:
初级警告:双闪 + 蜂鸣(持续 15 秒,每分钟重复)
高级干预:eCall 联动(发送位置 + "儿童被困" 信号)
环境控制:车窗降 10%+ 空调启动(电池电量≥20% 时)
《安全驾驶车辆辅助协议》:智能辅助的安全边界定义
1. 速度辅助系统:从 "信息提示" 到 "智能决策"
1.1 限速信息功能(SLIF)
- 精度要求:
距离精度:2000km 路试中,正确显示距离占比 > 80%
事件精度:限速变化识别率 > 80% - 高级功能(3 分):
条件限速(雨天 / 雪天自动调整)
动态限速(施工区实时更新)
隐含限速(城市入口 / 住宅区自动识别)
1.2 智能速度控制(iACC)
- 响应时间:限速变化后 5 秒内完成速度调整
- 偏移限制:±10km/h(默认 + 5km/h 可配置)
- 特殊场景:
下坡路段:自动增加制动力(坡度 > 5% 时)
环岛场景:提前 25 米减速至≤50km/h
2. 自适应巡航控制(ACC):全场景碰撞风险化解
2.1 车对车(Car-to-Car)性能
- 测试场景:
静止目标(直道 / 弯道):60-130km/h,10km/h 递增
移动目标(20/60km/h):需完全避免碰撞(分值 1)或减速 > 15km/h(分值 0.5)
切入 / 切出:TTC=0 秒(极端场景),要求减速 > 30km/h - 评分示例

2.2 弱势道路使用者(PTW/VRU)保护
- 摩托车场景(CMRs):
静止目标(60-90km/h):25% 碰撞位置,需减速 > 30km/h(1 分)
移动目标(60km/h):使用真实摩托车测试,避免碰撞得 1 分 - 行人和骑行者(CPLA/CBLA):
同向行驶:0% 碰撞位置,减速 > 30km/h 得 1 分,>15km/h 得 0.5 分
3. 转向辅助系统:动态车道保持能力验证
3.1 S 弯测试(4 分)
- 测试速度:60/80/100/130km/h 四档
- 评价标准:
全弯道保持车道:1 分 / 速度档
第一弯保持 + 第二弯调整:0.5 分 / 速度档 - 弯道参数:
第一弯:曲率半径 787m,长度 57.1m
第二弯:曲率半径 374m,长度 5.1m
3.2 变道辅助(LCA):1 分
- 触发条件:
驾驶员打转向灯后 0.5-2 秒内完成变道
相邻车道有车时自动取消变道
性能要求:变道过程横向加速度≤3.5m/s?,时间≤3 秒
三大协议的协同效应与行业影响
1. 技术整合要求
- 数据融合:DSM 与 ACC/LSS 的实时联动
驾驶员分心→ACC 增加车距 + LSS 增强转向力度
驾驶员无反应→启动 Emergency Function+ 关闭非必要功能 - 硬件升级:
多摄像头配置(前视 + 车内驾驶员监控)
毫米波雷达 + 激光雷达融合(尤其针对 VRU 检测)
2. 评分体系关联
- 基础资格线:
驾驶员参与和车辆辅助均需≥50 分,方可参与星级评级
乘客监控得分直接影响 "安全救援" 项分值 - 协同加分项:
DSM 检测到分心 + ACC 提前制动:额外加 1 分
CPD 报警 + eCall 联动:额外加 1 分
3. 对车企的合规建议
- 短期措施(2025 年内):
恢复关键物理按键(转向灯 / 雨刮等)
升级 DSM 算法(支持 Lizard 型眼球运动检测)
部署后排压力传感器 + 超声波检测组合方案 - 长期规划(2026-2030):
开发多模态生物传感(心跳 + 呼吸 + 体温)
构建车路协同限速数据链(接入 DFRS 云平台)
研发主动式安全带(预紧力度动态调整)
4. 消费者影响
- 安全提升:
儿童被遗忘风险降低 90%(CPD 系统)
追尾事故减少 40%(iACC+ AEB 组合)
车道偏离事故减少 35%(LSS 系统) - 使用习惯改变:
强制保持双手在方向盘(DSM 持续监控)
后排乘客安全带使用提醒常态化
辅助系统状态需实时关注
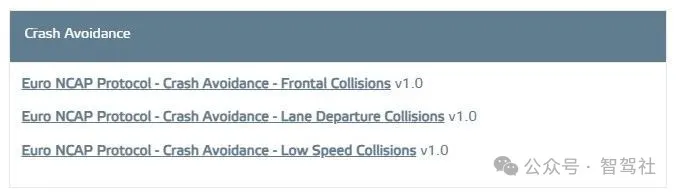
Euro NCAP 2026 年发布的《正面碰撞避免》《车道偏离碰撞避免》《低速碰撞避免》三大协议,标志着汽车主动安全测试进入全场景、高精度评估时代。这些协议不仅细化了传统碰撞场景的测试标准,更首次将驾驶员状态联动、弱势道路使用者保护、复杂城市环境模拟等纳入核心评估体系。以下从技术框架、测试细节、行业适配三个维度展开深度解析。
《正面碰撞避免协议》:全场景 AEB 系统的极限挑战
1. 测试体系的三维扩展
正面碰撞协议构建了 "纵向 - 转向 - 环境" 三维测试矩阵,覆盖从高速追尾到复杂路口转向的 28 种核心场景。在传统车对车(C2C)测试中,新增了曲率半径 787m 的弯道追尾场景(CCRs curve),要求车辆在 60-130km/h 速度范围内,对静止目标的碰撞避免率达到 100%(20km/h 以下),而 70km/h 以上需通过 FCW+AEB 组合将碰撞速度降低 30km/h 以上。
对弱势道路使用者(VRU)的测试呈现 "速度 - 位置 - 姿态" 三重严苛化:
- 纵向场景(CPLA/CBLA):
要求系统在 80km/h 速度下,对同向行走的行人(5km/h)或骑行者(20km/h)实现碰撞速度 reduction >30km/h,且 FCW 需在 TTC>1.7s 时触发 - 转向场景(CPTA/CBTA):
车辆以 25km/h 转向时,需对从远侧(farside)穿越的行人 / 骑行者实现 90% 侧面碰撞避免 - 遮挡场景(CPNCO/CBNAO):
通过三辆遮挡车模拟城市盲区,要求系统在 40km/h 下对突然出现的儿童或骑行者的反应时间≤0.8s
2. 技术实现的四大核心要求
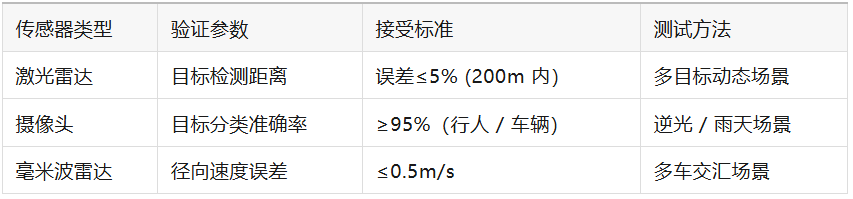
(1)传感器融合精度革命
协议要求激光雷达 + 毫米波雷达 + 8MP 摄像头的三传感器融合方案,在以下场景中表现出特定性能:
- 目标识别:
对摩托车(EMT)的检测距离≥120m(130km/h 场景),对行人的横向定位误差≤10cm - 动态响应:
AEB 系统在检测到目标后,需在 150ms 内完成决策,制动建压时间≤300ms - 干预优先级:
当 DSM 判定驾驶员无反应(闭眼≥6s),AEB 优先执行转向避撞(需在 200ms 内完成方向盘 15° 修正)
(2)驾驶员状态联动机制
首次要求 AEB 系统与 DSM(驾驶员状态监控)实现深度数据交互:
- 瞬态分心:
检测到驾驶员视线偏离(如看手机)时,AEB 提前 0.5s 触发,FCW 音量提升至 90dB - 非瞬态状态:
识别到驾驶员微睡眠(闭眼≥1.5s),系统自动激活紧急车道保持(ELK)并将 ACC 车距增至 1.5 倍 - 干预优先级:
当 DSM 判定驾驶员无反应(闭眼≥6s),AEB 优先执行转向避撞(需在 200ms 内完成方向盘 15° 修正)
(3)鲁棒性层测试体系
协议引入 "决策 - 感知 - 环境" 三层鲁棒性测试,典型场景包括:
- 决策层:
模拟驾驶员突发转向输入(40°/s)时,AEB 系统需在 50ms 内切换至制动优先策略 - 感知层:
使用不同颜色(黑白红三色)、带行李架的摩托车目标,测试识别率需≥95% - 环境层:
在施工区(含临时限速标志)、雾天(能见度 200m)等场景,系统性能衰减不得超过 15%
(4)评分体系的量化革新
采用 "颜色带动态评分法",将碰撞速度 reduction 与测试速度关联:

《车道偏离碰撞避免协议》:横向控制的智能化新纪元
1. 系统评估的五维框架
车道偏离协议构建了以 ELK(紧急车道保持)为核心,LDW(车道偏离警告)、LKA(车道保持辅助)、BSM(盲点监测)、驾驶员意图识别为支撑的五维评估体系。与 2020 版相比,2026 版在以下方面实现突破:
(1)ELK 系统的动态性能边界
- 横向控制精度:
在 80km/h 速度下,对突然偏离(侧向速度 0.6m/s)的修正能力需达到:
实线车道:DTLE(距离车道边缘)≥-0.1m(即轮胎不得压线)
虚线车道:允许 DTLE=-0.2m,但需在 1.5s 内回正 - 转向力矩特性:
驾驶员 override 力矩≤3.5Nm,系统干预响应时间≤120ms - 特殊场景:
在桥面横风(10m/s)条件下,ELK 修正偏差不得超过 0.3m
(2)驾驶员意图识别的三层逻辑
协议首次明确驾驶员意图与系统干预的优先级规则:
- 主动转向:
转向指示灯开启 + 方向盘转角 > 5° 时,ELK 自动抑制(响应时间≤80ms) - 紧急避让:
检测到前方碰撞风险(TTC<1.8s)时,优先执行 ELK+AEB 联合干预 - 分心补偿:
DSM 检测到驾驶员分心时,ELK 增益提升 30%,并增加方向盘振动警告(2Hz)
(3)BSM 与 ELK 的联动机制
在超车场景中,BSM 需与 ELK 实现以下数据交互:
- 目标检测:
对相邻车道 70km/h 行驶的摩托车,检测距离≥50m,虚警率≤1 次 / 100km - 风险评估:
当相邻车道车辆与本车横向距离 < 1.5m 时,ELK 禁止向该侧转向 - 预警策略:
结合后视镜灯光 + 座椅振动(右侧超车时右侧座椅振动),预警时间≥2.5s
2. 核心测试场景与评分标准
(1)单车辆测试(占比 30%)

(2)车对车 / 摩托车测试(占比 50%)
- 对向场景(ELK-ON):
70km/h 速度下,对向车以 50km/h 驶来,要求 ELK 在 TTC=1.8s 时启动,确保横向距离≥0.8m - 超车场景(ELK-OV):
本车以 80km/h 行驶,相邻车道车辆以 100km/h 超车,ELK 需抑制向该侧转向,误干预率≤5%
(3)鲁棒性测试(占比 20%)
- 环境干扰:
雨天(路面 PBC=0.6)+ 弯道(曲率半径 374m)组合场景,ELK 修正精度衰减≤20% - 传感器退化:
模拟前视摄像头遮挡 50%,ELK 需依赖毫米波雷达维持基本功能(修正精度≥标准的 60%)
《低速碰撞避免协议》:城市微场景的安全革命
1. 场景定义的三大突破
低速碰撞协议将评估重点从传统泊车场景扩展至 "停车 - 开门 - 倒车 - 蠕行" 四大城市微场景,新增以下核心测试:
(1)开门碰撞预警(CBDA)
- 测试条件:
车辆静止≤3 分钟,驾驶员开门时,对 15km/h 驶来的骑行者的预警时间≥1.7s - 系统要求:
传感器:超声波 + 视觉融合,检测距离≥5m(侧向)
预警方式:后视镜灯光 + 车门振动(振幅≥1.5mm)
干预措施:电动门锁延迟开启(延迟时间 0.8-1.2s)
(2)倒车儿童监测(CPMRC)
- 动态场景(CPMRCm):
车辆以 8km/h 倒车,对 5km/h 横穿的儿童(EPTc)需实现:
AEB 启动时间≤0.6s,停车距离≤0.5m
假人伤害指标:HIC≤1000,胸部加速度≤30g - 静态场景(CPMRCs):
车辆以 4km/h 倒车,对静止儿童的碰撞速度需≤1.5km/h
(3)蠕行防碰撞(CPMFC)
- 场景定义:
车辆以≤10km/h 蠕行,对突然出现的儿童(距离 1.5m),要求:
动力切断时间≤150ms,制动距离≤0.8m
误触发率:在停车场环境≤1 次 / 10 小时
2. 技术实现的五大核心模块
(1)超近场感知系统
- 超声波阵列:
12 通道超声波传感器,角分辨率≤5°,探测距离 0.2-5m - 鱼眼摄像头:
180° 视角,像素≥2MP,低光性能(1lux 下识别率≥90%) - 融合算法:
卡尔曼滤波 + 动态时间规整,解决多目标遮挡问题
(2)短距 AEB 专用控制器
(3)开门安全联动系统
- 车门状态监测:
角速度传感器 + 位置编码器,分辨率≤1° - 风险评估模型:
基于骑行者速度、距离、车门开启角度的三维风险图谱 - 多级预警:
视觉预警(后视镜 LED 闪烁):TTC=2.5s
触觉预警(车门振动):TTC=1.8s
机械锁止:TTC=1.2s
(4)倒车多目标跟踪
- 算法创新:
引入 Transformer 架构,实现对跑动儿童、宠物、柱体的同时跟踪 - 数据增强:
使用 10 万 + 倒车场景数据训练,包含 90% 以上的遮挡情况 - 性能指标:
多目标跟踪准确率≥95%,漏检率≤0.5%
(5)驾驶员意图预判
- 踏板行为分析:
压力传感器 + 行程传感器,识别误踩踏板意图 - 方向盘转角:
结合 DSM 视线方向,判断是否为主动倒车操作 - 干预策略:
非主动倒车场景(如误挂倒挡),AEB 优先级提升 30%
Euro NCAP 2026 年发布的《安全驾驶及碰撞避免虚拟测试协议》,标志着汽车安全评估从物理测试向数字孪生时代的全面转型。这份协议不仅建立了虚拟测试与物理测试的等效性评估体系,更通过 ISO 评分、关键性能指标(KPI)等量化标准,推动车企将仿真技术融入全研发周期。
《安全驾驶及碰撞避免虚拟测试协议》:主动安全的数字孪生革命
1. 场景化虚拟测试体系
该协议针对主动安全系统构建了 "感知 - 决策 - 执行" 全链路仿真框架,覆盖四大场景集群:
(1)正面纵向碰撞(CCRs/CMRs)
- 仿真要点
目标车辆(GVT)需包含 ISO 19206 定义的动力学模型
传感器模型需模拟激光雷达 / 摄像头的探测范围(如激光雷达水平视场 120°,测距 200m) - 关键 KPI
AEB 触发时间误差≤0.2s
碰撞速度 reduction 误差≤1.0m/s
(2)转向碰撞(CCFtap/CMFtap)
- 场景参数
转向曲率半径需匹配实际测试(如 25km/h 转向半径 9m)
目标车横向位置误差≤0.15m - 评估指标
避撞成功率≥90%(虚拟 vs 物理)
方向盘修正力矩误差≤15%
(3)交叉路口碰撞(CCCscp/CMCscp)
- 环境建模
路口宽度需符合 UN ECE R130(3.5m 车道)
遮挡物(如停放车辆)尺寸需匹配附录 B 规定 - 性能要求
对向车检测距离误差≤5%
紧急制动启动时间误差≤0.25s
(4)车道偏离(ELK)
- 车道模型
实线 / 虚线宽度需符合 0.1-0.25m 标准
道路边缘(草 /gravel)摩擦系数建模误差≤10% - 控制指标
车道保持横向误差≤0.2m
转向响应延迟≤120ms
2. 数字化验证体系
(1)感知系统验证
(2)决策算法验证
- ISO 评分
纵向加速度通道评分≥0.5(基于 ISO TS 18571) - 策略一致性
紧急制动策略与物理测试偏差≤15%
转向避撞路径误差≤0.3m
(3)执行系统验证
- 制动系统
制动力建立时间误差≤10%(目标 300ms) - 转向系统
最大转向力矩误差≤8%(目标 3.5Nm)
3. 行业实施挑战
(1)技术难点
- 多物理场耦合
需实现车辆动力学、传感器信号、约束系统的实时耦合,计算延迟≤1ms - 极端场景建模
如暴雨(降雨量≥5mm/min)、强逆光(光照≥10000lux)的环境模拟 - 驾驶员模型
需包含疲劳 / 分心状态下的反应延迟(如分心时反应延迟 + 0.5s)
(2)成本与收益
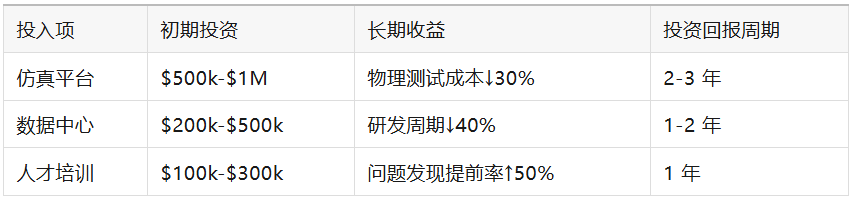
协议的协同效应与行业变革
1. 测试体系的数字化融合
(1)数据互通机制
- 格式统一
物理与虚拟测试均采用 ISO MME 标准格式,通道命名需一致(如 10VEHC000000ACXS 表示纵向加速度) - 时间同步
虚拟测试需对齐物理测试的 AEB 触发时间(Taeb),时间偏移≤50ms
2. 对汽车研发的影响
(1)流程重构
- V 型开发流程调整
虚拟测试提前至需求分析阶段,取代传统概念设计后的物理验证 - 数字孪生应用
建立从零部件到整车的全层级数字孪生,实现全生命周期仿真
(2)技术创新方向
- AI 驱动仿真
引入机器学习优化网格划分,计算效率提升 2-3 倍 - 云端协同
建立多车企共享的云端仿真平台,降低中小企技术门槛 - 极端场景生成
通过 GAN 网络生成百万级极端工况,覆盖 99% 以上测试场景
3. 未来发展趋势
(1)虚拟测试占比提升
- 2026 年:30% 安全评估基于虚拟测试
- 2030 年:预计 70% 评估可通过虚拟完成,物理测试仅保留基准验证
(2)标准演进方向
- 功能安全融合
将 ISO 26262 ASIL 等级纳入虚拟测试评估 - 车路协同
增加 V2X 场景仿真,如交叉路口盲区预警 - 用户行为
引入真实驾驶数据(如高田数据库)提升场景真实性
Euro NCAP 2026 虚拟测试协议的发布,标志着汽车安全评估进入 "数字优先" 时代。车企需在 2025 年内完成仿真平台升级、数据体系建设及人才储备,以应对从被动防护到主动安全的全链条数字化挑战。这一变革不仅能大幅降低研发成本,更将推动汽车安全技术向智能化、个性化方向发展。

2025 年 3 月发布《Euro NCAP 辅助驾驶高速公路与城市间辅助系统协议》(Version 1.0),2026 年 1 月正式实施,该协议是对 Euro NCAP 2026 年汽车安全评级体系的重要补充,聚焦辅助驾驶系统(SAE L2 级)的评估,其评分与星级评级分开公布,但影响车辆安全评级的基础资格(需驾驶协作和驾驶员监控得分均≥50%)。
核心评估框架
- 两大支柱:
辅助能力(Assistance Competence)
平衡 “车辆辅助” 与 “驾驶员参与”,总分 100 分。
安全备份(Safety Backup)
评估系统故障应对、非瞬态驾驶员状态处理及碰撞避免能力,总分 100 分。 - 分级标准
两者总分决定辅助驾驶等级,分为 “VERY GOOD(≥160 分)”“GOOD(≥140 分)”“MODERATE(≥120 分)”“ENTRY(≥100 分)”。
关键术语定义(部分核心术语)

辅助能力评估(总分 100 分)
(一)驾驶员参与(Driver Engagement,总分 100 分)
1. 消费者信息(25 分)
- 系统命名(10 分)
名称需包含 “assist”“assistance” 等词,禁止使用 “auto”“self-drive” 等暗示自动化的词汇,否则扣分。 - 营销材料(5 分)
不得夸大系统功能(如宣传 “自动驾驶”),禁止展示驾驶员双手脱离方向盘的图片,违规则不得分。 - 快速入门指南(5 分)
需提供系统操作和限制的简要说明,支持纸质 / 数字 / 视频等形式,若可通过车载信息娱乐系统播放教程,额外加 2 分。 - 车辆手册(5 分)
需明确说明系统为辅助性质,驾驶员需始终参与,详细描述操作和限制。
2. 系统状态(25 分)
- 连续状态指示(20 分)
需在手动模式、纵向控制(如 ACC)、纵横向联合控制模式下,通过仪表盘或抬头显示(绿色表示辅助模式)持续显示系统状态,且始终开启。 - 状态变化指示(5 分)
辅助等级变化时,需通过视觉(等级提升)或视觉 + 声音 / 触觉(等级降低,音量 50-90dB)提示驾驶员。
3. 驾驶员监控(25 分)
- 双手监控(5 分)
需通过传感器(非仅扭矩输入) robustly 检测驾驶员双手是否在方向盘上。 - 瞬态分心监控(20 分)
场景
长分心(视线移开道路超 3 秒)、短分心(多次短时视线转移)、手机使用。
要求
DSM 需实时检测,触发视觉 / 声音警告,并调整 ACC 车距或实施其他安全干预(如警告阈值不超过基准的 150%)。
bonus:若系统在 15 分钟内 3 次检测到驾驶员分心后锁定辅助模式,额外加 4 分(总分不超过 20 分)。
4. 驾驶协作(25 分)
- 转向扭矩 override(5 分)
在 “坑洼测试” 和 “部分变道测试” 中,评估驾驶员转向输入时系统的阻力。扭矩增加≤33% 得 5 分,超过 100% 不得分。 - override 响应(20 分):系统需在驾驶员转向时快速释放辅助,变道后自动恢复,且 override 扭矩 < 5Nm 时满分。
车辆辅助(Vehicle Assistance,总分 100 分)
1. 速度辅助(25 分)
- 速度辅助系统评估(20 分)
基于 Euro NCAP 标准测试,评估 ACC 对速度限制的识别和调整能力。 - 限速变化响应(5 分)
iACC 需在通过限速标志前开始调整车速(自动调整需在车轴过标志前,手动确认需在提示后 1.5 秒内操作)。
2. 自适应巡航控制(ACC)性能(45 分)
- 车对车(18 分)
包括静止目标(直道 / 弯道)、移动目标、制动目标及车辆切入 / 切出测试,需完全避免碰撞或显著降低速度。 - 车对弱势道路使用者(PTW,15 分)
针对摩托车静止 / 移动 / 制动场景,评估 ACC 和 AEB 的协同效果。 - 车对行人 / 骑行者(VRU,6 分)
测试对同向行走行人(CPLA-0)和骑行者(CBLA-0)的碰撞避免能力。 - 道路特征(3 分)
评估 ACC 在弯道、环岛、路口等场景的适应性。 - 自动恢复(3 分)
停车后系统自动恢复巡航的能力。
3. 转向辅助(30 分)
- 车道保持(24 分)
评估车道居中(LC)、车道保持辅助(LKA)等功能在不同速度和弯道下的表现。 - 变道辅助(LCA,6 分)
驾驶员发起或系统建议的单车道变道操作的安全性和流畅性。
安全备份评估(总分 100 分)
系统故障(25 分)
- 传感器遮挡测试:
启动时遮挡(10 分)
启动前覆盖传感器,若系统无法激活且 5 分钟内显示视觉警告得 10 分。
行驶中遮挡(系统未激活,5 分)
行驶中覆盖传感器,系统无法激活且显示警告得 5 分。
行驶中遮挡(系统激活,10 分)
激活状态下覆盖传感器,系统在 2 分钟内取消并显示警告得 10 分。
- 冗余验证
若厂商宣称传感器遮挡不影响性能,需通过碰撞测试验证,通过则得 20 分,再加上警告显示得 5 分。
非瞬态驾驶员状态(25 分)
- 微睡眠(5 分)
检测到微睡眠后,立即发出视觉 + 声音 / 触觉警告,并增加 ACC 车距。 - 睡眠(5 分)
响应同微睡眠,需更及时的干预策略。 - 无反应驾驶员(15 分)
间接检测(如长时间转向无操作,10 分)
触发紧急功能,控制车辆停车或减速至蠕行。
直接检测(DSM,10 分)
同时间接检测要求。
高级响应(5 分)
车辆自动变道至慢车道或应急车道。
碰撞避免(50 分)
- 车对车(10 分)
在 ACC 测试基础上,增加更严苛的切入 / 切出场景(TTC=2 秒),评估 AEB 和 FCW 的表现,完全避免得 1 分,减速 > 30km/h 得 0.5 分,FCW 在 TTC>1.5 秒发出得 0.25 分。 - 车对 PTW(10 分)
同车对车逻辑,针对摩托车场景。 - 车对 VRU(5 分)
评估对行人 / 骑行者的碰撞避免,允许在紧急情况下结合转向辅助。 - 车道支持系统(25 分)
S 弯(20 分)
测试车辆在弯道中保持车道的能力,LKA 干预防止越线 > 0.4m 得 5 分,LDW 在越线 > 0.3m 前警告得 2.5 分。
变道防碰撞(5 分)
评估 ELK 等系统在相邻车道有车辆时阻止危险变道的能力。
协议对行业的影响
(一)技术要求升级
- 传感器冗余与可靠性
强制要求传感器遮挡检测和系统降级策略,推动多传感器融合(如雷达 + 摄像头 + 激光雷达)。
- 驾驶员监控强化
DSM 需同时检测瞬态和非瞬态状态,且干预策略需结合场景(如城市道路与高速公路的灵敏度差异)。
- 人机交互优化
系统状态显示需更直观,物理按键(如转向灯、双闪)的保留成为评分项(2026 年起无独立按键将扣分)。
(二)测试场景复杂化
- 新增边缘案例
低速场景、油门误踩(PMA)、传感器部分遮挡(如摄像头半覆盖)等。
- 动态目标扩展
引入真实摩托车、行人 / 骑行者动态目标(如 Euro NCAP Pedestrian Target,EPTa),提升测试真实性。
(三)厂商应对策略建议
- 提前适配评分逻辑
重点优化 “驾驶员参与” 与 “车辆辅助” 的平衡,避免因 DSM 性能不足导致辅助能力得分被限制。
- 强化安全备份设计
尤其是无反应驾驶员的紧急停车策略(如自动变道至应急车道),这是高分关键。
- 用户教育合规化
营销材料和手册需严格避免夸大宣传,快速入门指南需包含系统限制说明。





